Cover Image: Lilly Guilbeault, April 2026
By: Flore Devernay, Contributing Writer
In 1608, Peter Roth published Arithmetica Philosophica, where he proved that a polynomial equation of degree n has n real roots. For example, y=x3 (shown below) has 3 roots. This means there are three values that, when plugged in for x, in y=x3, result in 0. However, if you look at the graph of y=x2+1, shown below, it is visually clear that the curve has no roots.
Now, here’s what your high school teacher probably told you after confronting you with this mystery: y=x2+1 does in fact have roots, which are √-1 and -√-1, also known as i and -i. So you nodded, remembered that i is the imaginary number, for which i2=-1, and went on with your life.
But, the truth is, i represents much more than just √-1, and is much more real than its name suggests.The poor wording decision of our teachers unfortunately creates an idea of i as an “unattainable” number. However,here’s what the mathematician Gauss had to say about it:
“That this subject [imaginary numbers] has hitherto been considered from the wrong point of view and thus enveloped in mystery and surrounded by darkness, is to be attributed largely to an ill-adapted notation”.
Despite being surrounded by darkness, as Gauss believes, i is also surrounded by the complex plane.
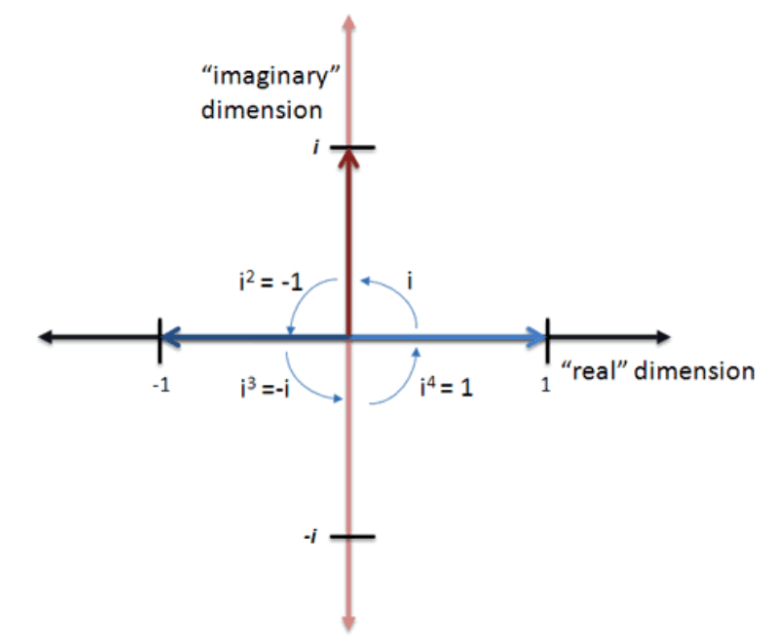
The complex plane is where imaginary and real numbers meet, where real numbers lie along the x axis, while imaginary numbers lie along the y axis. This plane is spanned by complex numbers, which are a combination of real and imaginary numbers (like 2 + i, 400.3 – 21.5i, or even just 1).
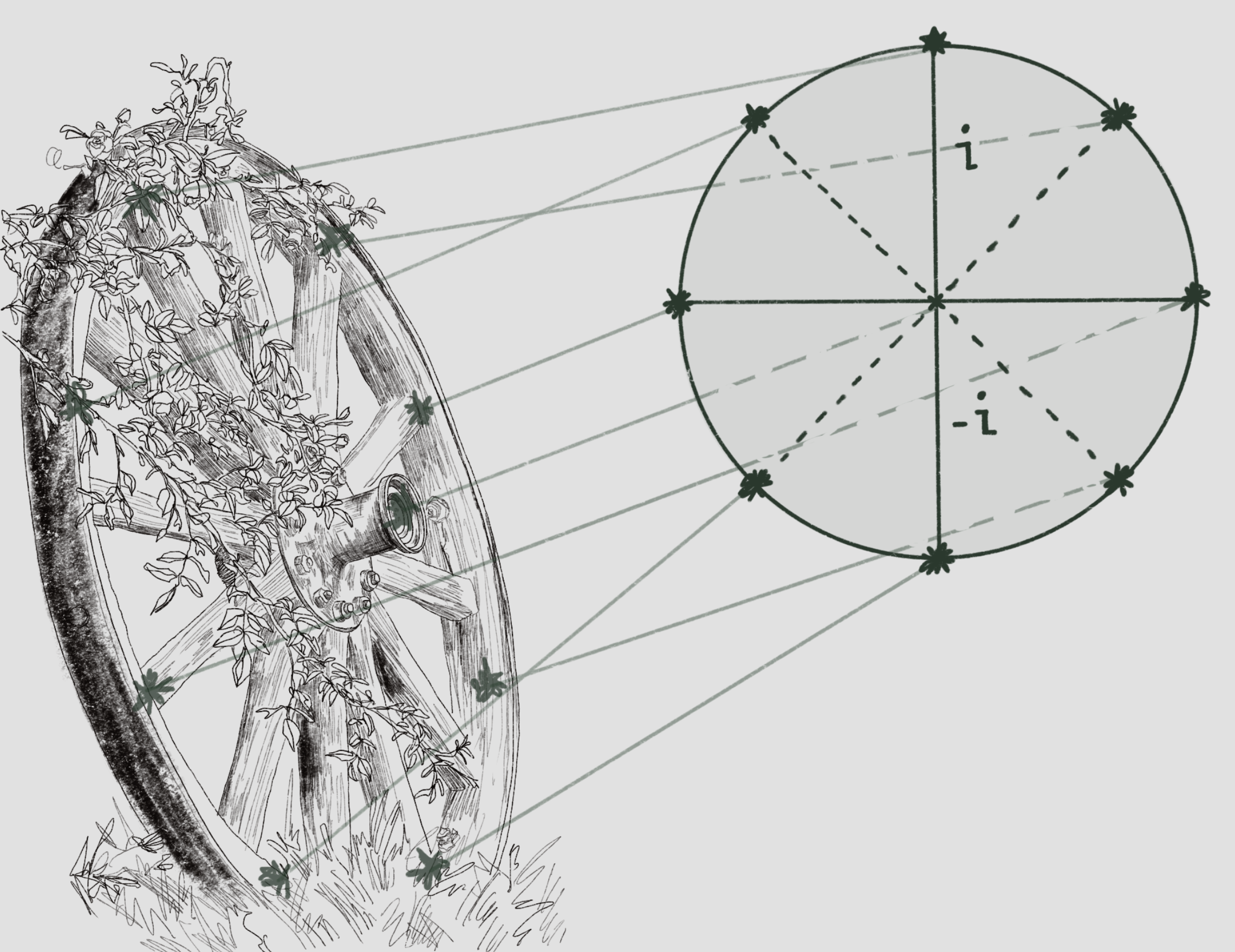
There lies the real magic of i: rotation. Multiplying a number on the complex plane by i results in a rotation by 90 degrees, cycling between real and imaginary. Let’s take 1: 1 × i = i → i × i = -1→ -1 × i = -i → -i × i = 1 and the cycle goes on.
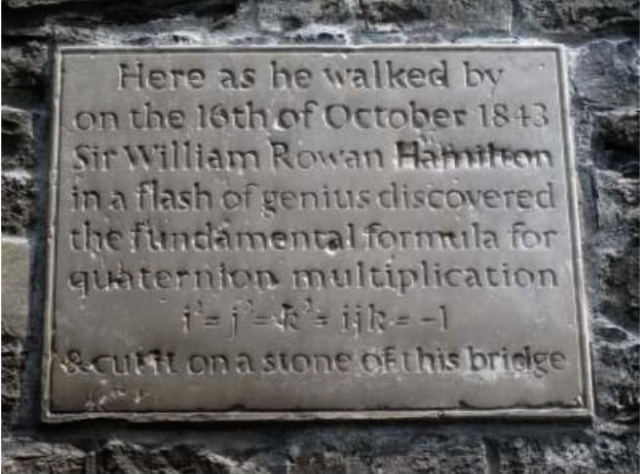
From this on, mathematicians further explored the √-1 to describe rotations in 3D and 4D space, using quaternions. A quaternion is a 4D number system, where coordinates are written as a + bi + cj + dk where j and k are also √-1 but on a different axis than i and real numbers. The coordinates i, j and k are defined by a common rule: i2 + j2 + k2 = ijk = -1.
This means that by multiplying a quaternion coordinate by i, j, and k, you are essentially performing three 90-degree rotations in three different planes, which results in the number being flipped exactly 180 degrees from where it started.
You might have seen i, j and k in your linear algebra class as unit vectors of the axis and even in your physics class when separating vector compounds. They are the absolute greatest when dealing with rotations in math, much greater than x, y and z which run into “glitches” when dealing with certain rotations.
This happened during the Apollo 11 moon landing, which used a three-ring gimbal system, as shown below.

The gimbal system follows x, y, z coordinates. If two of the rings lined up, the system would go into a “gimbal lock” and the computer would lose track of where the ship was pointing, as it lost a degree of freedom, and was restricted to 2 dimensions. Because of this, the ship was restricted in its movement, to avoid what could lead to the total failure of the mission. The i, j, k coordinates are much better in the sense that they all belong to a different dimension and thus cannot line up to lose a degree of freedom.
In practice, these rotations using imaginary numbers are primarily used by satellites in space, where there is no “up” or “down”, and rotating back to the same point is absolutely crucial. They
are also a technical artist’s favorite tool, used in video games and your favorite Marvel movie (and it better be Black Panther).
